
姓名:钟杭
职称:副教授,岳麓学者
邮箱:zhonghang@hnu.edu.cn
通信地址:湖南大学桃子湖机器人学院C2栋101室
谷歌学术:
https://scholar.google.com.hk/citations?user=nogviLMAAAAJ&hl=zh-CN
2025年招收博士生1名,欢迎各位同学联系!
一、基本情况
钟杭,1990年11月生,现为湖南大学机器人学院副教授,岳麓学者,博士生导师,机器人视觉感知与控制技术国家工程研究中心研究员,国家重点研发计划青年科学家项目首席科学家,湖南省科技创新领军人才,入选博士后创新人才支持计划、湖南大学杰出博士后,担任中国自动化学会机器人智能专委会委员、青年工作委员会副秘书长,中国指挥与控制学会青年工作委员会委员,中国计算机学会智能机器人学会委员。主要从事机器人规划与控制、集群机器人协同、特种机器人技术与系统等领域研究工作,获湖南省优秀博士学位论文、湖南大学优秀教师新人奖、IEEE ROBIO2024、ICARM 2022等最佳论文奖等。
近年来,主持国家重点研发计划青年科学家项目,军科委技术领域基金、国家自然科学基金联合基金重点项目课题、青年项目,博士后创新人才支持计划项目,博士后面上项目、湖南省自然科学基金青年项目等,参与科技创新2030—“新一代人工智能”重大项目课题、国家自然科学基金重点项目、军科委重点项目等。在IEEE汇刊等期刊上发表60多篇论文,授权发明专利40余项。技术成果获2023年湖南省科技进步一等奖,2020年湖南省科学技术创新团队奖、2019年中国商业联合会科技进步一等奖、2018年中国机械工业科学技术二等奖、2017年湖南省科技进步一等奖,指导学生获中国国际“互联网+”大学生创新创业大赛银奖、湖南省“互联网+”大学生创新创业大赛一等奖,中国研究生机器人创新设计大赛一等奖等。
二、教育与工作经历
2022.12-至今 湖南大学,机器人学院 副教授,王耀南院士团队
2020.5-2022.11 湖南大学,控制科学与工程,博士后,导师:王耀南 院士
2013.9-2020.4 湖南大学,控制科学与工程,博士(硕博),导师:王耀南 院士
2009.9-2013.6 湖南大学,电气工程及其自动化,学士
三、科研项目
[1]. 国家重点研发计划青年科学家项目,刚柔软一体化空中接触式作业机器人系统及应用(2022YFB4701800),2023.1-2025.12,主持
[2]. 军科委173技术领域基金,XXX环境感知模组,2023.11-2025.11,主持
[3]. 国家自然科学基金联合基金重点项目课题,面向跨场景自主作业的机器人应用验证及性能评估(U22A2057),2023.1-2026.12,主持
[4]. 国家自然科学基金青年项目,空中作业机器人接触模态动力学耦合建模与自主控制方法研究(62103140),2021.10-2024.10,主持
[5]. 湖南省科技创新领军人才(2023RC1049),2023.9-2025.9,主持
[6]. 博士后创新人才支持计划(BX20200122),2020.07-2022.07,主持
[7]. 博士后基金面上项目,空中机器人视觉伺服自主控制(2020M682555),2020.11至2022.11,主持
[8]. 湖南省自然科学基金青年项目,面向探测与维护任务的空中作业机器人自主控制方法研究(2021JJ40124),2021.1-2023.12,主持
[9]. 军委科技委重点项目,无人集群XXXXX,2021.11-2025.11,参与
[10]. 科技创新2030—“新一代人工智能”重大项目课题,自主无人系统的开放通用高端智能控制器(2021ZD0114503),2022.6-2025.5,参与
[11]. 国家自然科学基金重点项目,复杂受限环境下机器人多模态三维感知与自主灵巧作业研究(62133005),2021.10-2026.10,参与
[12]. 国家自然科学基金共融机器人重大研究计划,面向生物疫苗制造的配药制药共融机器人关键技术研究(92148204),2022.01-2025.12,参与
[13]. 长沙市科技重大专项,面向重大疫情的应急防控救护智能机器人(kh2102023),2020.7-2024.6,参与
四、代表性论文、著作
[1]. X. Zhou, H. Zhong*, H. Zhang, Y. Jiang and Y. Wang, "Optimization-Based Single Anchor UWB Positioning System for Mobile Robots," in IEEE Transactions on Instrumentation and Measurement, vol. 73, pp. 1-11, 2024, Art no. 7510111, doi: 10.1109/TIM.2024.3481589.
[2]. H. Zhong*, J. Liang, Y. Chen, H. Zhang, J. Mao and Y. Wang, "Prototype, Modeling, and Control of Aerial Robots With Physical Interaction: A Review," in IEEE Transactions on Automation Science and Engineering, doi: 10.1109/TASE.2024.3395658.
[3]. Liang J, Zhong H*, Wang Y, et al. Reference optimization-based compliant control for aerial pipeline inspection using a hexacopter with a robotic contact device[J]. IEEE/ASME Transactions on Mechatronics, 2024.
[4]. Xidong Zhou, Hang Zhong*, Hui Zhang, Wei He, Hean Hua, Yaonan Wang, Current Status, Challenges, and Prospects for New Types of Aerial Robots, Engineering, 2024.
[5]. H. Hua, Y. Wang, H. Zhong, H. Zhang and Y. Fang, "A Novel Guided Deep Reinforcement Learning Tracking Control Strategy for Multirotors," in IEEE Transactions on Automation Science and Engineering, doi: 10.1109/TASE.2024.3374752.
[6]. Jiacheng Liang, Hang Zhong*, Yaonan Wang, Yanjie Chen, Junhao Zeng and Jianxu Mao, Adaptive Force Tracking Impedance Control for Aerial Interaction in Uncertain Contact Environment Using Barrier Function, in IEEE Transactions on Automation Science and Engineering, doi: 10.1109/TASE.2023.3301023.
[7]. Jiacheng Liang, Yaonan Wang, Hang Zhong*, Yanjie Chen, Hongwen Li, Jianxu Mao, Wei Wang, Robust Variable Impedance Control for Aerial Compliant Interaction With Stability Guarantee. IEEE Transactions on Industrial Informatics., doi: 10.1109/TII.2023.3306574.
[8]. Hang Zhong, Yaonan Wang, Zhiqiang Miao*, Ling Li, Shuanwen Fan and Hui Zhang, A Homography-Based Visual Servo Control Approach for an Underactuated Unmanned Aerial Vehicles in GPS-Denied Environments, IEEE Transactions on Intelligent Vehicles, Early Access, DOI: 10.1109/TIV.2022.3163315.
[9]. Hang Zhong, Zhiqiang Miao*, Yaonan Wang, Jianxu Mao, Ling Li, Hui Zhang, Yanjie Chen, Rafael Fierro, A Practical Visual Servo Control for Aerial Manipulation Using a Spherical Projection Model, IEEE Transactions on Industrial Electronics, vol. 67, no. 12, pp. 10564-10574, 2020.
[10]. Zhiqiang Miao, Hang Zhong*, Yaonan. Wang, Hui Zhang, Haoran Tan, Rafael Fierro, Low Complexity Leader-Following Formation Control of Mobile Robots Using Only FOV-Constrained Visual Feedback, IEEE Transactions on Industrial Informatics, vol. 18, no. 7, pp. 4665-4673, 2021.
[11]. Zhiqiang Miao, Hang Zhong*, Jie Lin, Yaonan Wang, Yanjie Chen and Rafael Fierro, Vision-Based Formation Control of Mobile Robots With FOV Constraints and Unknown Feature Depth, IEEE Transactions on Control Systems Technology, vol. 29, no. 5, pp. 2231-2238, 2021.
[12]. Zhiqiang Miao, Hang Zhong*, Jie Lin, Yaonan Wang, Rafael. Fierro, Geometric Formation Tracking of Quadrotor UAVs Using Pose-Only Measurements, IEEE Transactions on Circuits and Systems II: Express Briefs, vol. 69, no. 3, pp. 1159-1163, 2021.
[13]. Hang Zhong, Yaonan Wang, Zhiqiang Miao*, Jianhao Tan, Ling Li, Hui Zhang, Rafael. Fierro, Circumnavigation of a moving target in 3D by multi-agent systems with collision avoidance: An orthogonal vector fields-based approach, International Journal of Control, Automation and Systems, vol. 17, no. 1, pp. 212-224, 2019.
[14]. Ningbin Lai, Yanjie Chen, Jiacheng Liang, Bingwei He, Hang Zhong, Hui Zhang, Yaonan Wang, Image Dynamics-Based Visual Servo Control for Unmanned Aerial Manipulatorl With a Virtual Camera, IEEE/ASME Transactions on Mechatronics, vol. 27, no. 6, pp. 5264-5274, 2022.
[15]. Junhao Zeng, Hang Zhong*, Yaonan Wang, Shuanwen Fan, Hui Zhang, Autonomous control design of an unmanned aerial manipulator for contact inspection, Robotica, Online, DOI: https://doi.org/10.1017/S0263574722001588.
五、部分授权专利
[1]. 钟杭; 曾俊豪; 王耀南; 朱青; 张辉; 毛建旭; 华和安; 江一鸣; 谢核: 一种用于空中机器人自主作业的视觉阻抗控制方法及系统, ZL 202411008641.1, 2024-07-26
[2]. 钟杭; 吴洁铃; 王炜正; 王硕; 穆森源; 张辉; 彭伟星; 王耀南: 风力发电机叶片检测攀爬机器人及其运动控制方法, ZL 202411008813.5, 2024-07-26
[3]. 钟杭; 范泷文; 王耀南; 张辉; 江一鸣; 毛建旭; 朱青: 一种基于视觉的旋翼无人机抗扰动控制方法及系统, ZL202310443703.0, 2023-06-23.
[4]. 钟杭; 曾俊豪; 王耀南; 张辉; 毛建旭: 一种用于空中接触式无损检测作业的机器人及控制方法, ZL202111594747.0, 2021-12-24.
[5]. 钟杭; 梁嘉诚; 王耀南; 张辉; 毛建旭; 朱青: 稳定性约束下的空中作业机器人可变阻抗控制方法及系统, ZL202310878118.3, 2023-08-25.
[6]. 钟杭; 王耀南; 李玲; 缪志强: 一种用于输电线路维护的空中作业机器人, ZL202010916309.0, 2020-09-03.
[7]. 钟杭; 王耀南; 李玲; 张辉; 刘理; 高加林: 一种空中作业机器人的自增稳控制方法、装置、终端、系统及可读存储介质, ZL 202010916332, 2020-09-03.
[8]. 毛建旭; 杨燕清; 钟杭; 王耀南; 张辉; 江一鸣: 一种空中作业机器人的柔顺控制方法、装置、终端、系统及可读存储介质, ZL202010916313.7, 2020-09-03.
[9]. 王耀南; 龙禹; 钟杭; 毛建旭; 梁嘉诚; 范泷文; 曾俊豪; 一种全驱动型六旋翼无人机位姿控制方法及装置, ZL 202310332102.2, 2023-06-23.
[10]. 王耀南; 范泷文; 钟杭; 李玲; 缪志强; 张辉; 林杰: 基于视觉学习驱动的空中机器人集群控制方法及系统, ZL 202110398811.1, 2022-07-01.
[11]. 毛建旭; 杨燕清; 钟杭; 王耀南; 陈煜嵘; 张辉; 朱青: 基于云边协同的输电线路绝缘子自爆缺陷检测系统及方法, ZL 202110746924.6, 2021-10-26.
[12]. 王耀南; 钟杭; 陈彦杰; 缪志强; 潘琪; 高小龙; 李力: 一种用于电站巡检和维修的智能机器人及其控制系统, ZL201410182458.3, 2014-04-30.
六、部分荣誉与奖励
[1]. 2023年湖南省科技创新领军人才
[2]. 2023年湖南大学优秀教师新人奖
[3]. 2022年湖南省优秀博士学位论文
[4]. 2023年湖南省科技进步一等奖,工业制造机器人高精准视觉感知与控制关键技术及应用,排名5/12
[5]. 2021年湖南大学第三届杰出博士后
[6]. 2020年人力资源与社会保障部,博士后创新人才支持计划
[7]. 2023年中国公路学会科学技术一等奖,山区高速公路桥梁隧道检测新技术及装备,排名12/12
[8]. 2020年湖南省科技进步创新团队奖,湖南大学机器人感知与智能控制创新团队,排名14/15
[9]. 2019年中国商业联合会科学技术进步一等奖,复杂铸件机器人柔性生产线智能打磨加工技术及装备,排名6/10
[10]. 2019年湖南省科技进步二等奖,高端智能铸造机器人柔性生产线关键技术及成套装备,排名5/8
[11]. 2017年湖南省科技进步一等奖,电力极端环境特种作业机器人关键技术及应用,排名11/12
七、主要科研方向
1、空中仿生作业机器人建模、规划与控制
现有空中机器人多搭载传感器以被动观测形式工作,而具备类生物主动作业能力的仿生型空中机器人是未来发展的一个重要方向。针对空中仿生作业机器人与环境交互过程中存在的动力学耦合强,力交互机制复杂等难题,开展空中仿生作业机器人机构设计分析、动力学耦合建模、自主作业规划、力交互控制等方向研究,并以风电、桥梁等工程设施检测运维为背景进行应用。

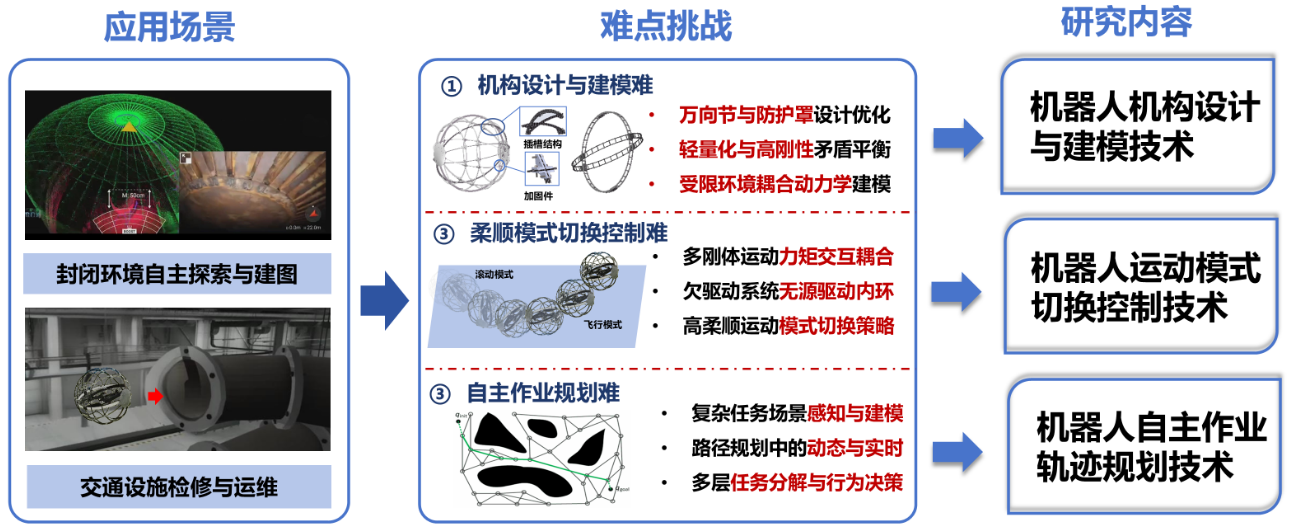
2、球形多模态运动机器人自主规划与控制
常规单模态机器人环境适应能力差,应用场景有限、功能单一,而具备多模态运动能力的球形机器人,则具备较强的环境适应能力,更加适合应用于特殊场景。针对球形多模态运动机器人自主规划与控制,考虑在不同地形与任务场景下的路径规划策略,以及不同运动模式之间的控制切换,开展球形多模态运动机器人的系统结构设计、环境耦合动力学建模、自主作业规划、控制模式柔顺切换等方向研究,并以密闭油气管道等受限环境巡检维护为背景进行应用。
3、无人集群系统自组织协同规划与控制
固定翼无人机因其长航时、高速飞行的特性,在战场侦察、火力支援以及民用领域环境监测等场景中具备广泛应用潜力。然而,固定翼无人机在多机集群协同任务中面临多种复杂挑战。针对固定翼无人机集群在任务执行中存在的规划控制约束复杂、编队协同困难以及动态环境适应性不足等难题,开展针对性的建模、规划与控制研究。


