一、基本情况
王立坤,现为湖南大学机器人学院教授,岳麓学者,博士生导师。2023国家级青年基金获得者,国家高层次人才。机器人视觉感知与控制技术国家工程研究中心研究员,曾任职于英国诺丁汉大学航空制造中心(空中客车公司)。为国际顶级飞机生产制造公司(空客公司、吉凯恩集团、英国航空系统公司和赛峰集团等)研发多项技术,项目金额共计大约3亿人民币。
研究方向:模仿学习;数字孪生;高精度测量;智能制造;集群制造;大飞机装配
二、教育与工作经历
2023.10-至今 湖南大学 机器人学院 教授
2019.4-2023.6 诺丁汉大学 航空制造中心(空客) Research Fellow
2014.9-2019.10 哈尔滨工业大学 控制科学与工程 硕博连读 工学博士
2011.9-2014.6 莫斯科鲍曼国立技术大学 火箭制造即航天学 工学学士
2009.9-2014.6 哈尔滨工业大学 飞行器设计与工程 工学学士
2009.9-2014.6 哈尔滨工业大学 俄语 文学学士
三、主讲课程
智能机器人系统(RO05005)
人工智能算法与基础(RO04007)
多个体学习与集群智能(B2009425M)
四、科研团队与研究方向
课题团队依托湖南大学机器人学院王耀南院士领导的机器人视觉感知与控制国家工程研究中心,同时与英国帝国理工、英国诺丁汉大学航空制造中心和英国谢菲尔德大学ARMC等建立了紧密的合作关系,主攻航空制造落地项目。可推荐优秀的研究生毕业生交流深造。团队毕业学生深受华为、航天集团、中国电科等国内高新技术企业和研究所欢迎,优秀学生可获得团队内推机会。
团队常年招收博士后、博士以及硕士,并为参与团队科研项目研究与团队建设提供丰厚的劳务补助。欢迎对人接协同物理式交互、航空智能装配与制造、工艺级数字孪生技术、大飞机集群制造等领域感兴趣,数学理论基础好,编程实践能力强(C++,ROS,Python,Matlab等),自动化、计算机、电子信息、机械电子等相关专业的学生报考硕士和博士研究生。
承诺:本人名下的学生,会亲自培训亲自带,包括但不限于控制、测量、机器人、工控、制造等相关技术和软件。
欢迎感兴趣的同学联系邮箱:likunwang@hnu.edu.cn或微信nich128。
五、部分验证场景和项目落地
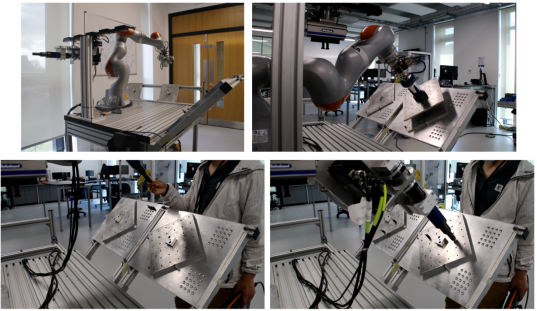
人机协同交互:


人机协同装配
高精度测量:


基于数字摄影设备的高精度装配(0.1mm)
航空智能装配与制造:
小部件装配(螺栓紧固)
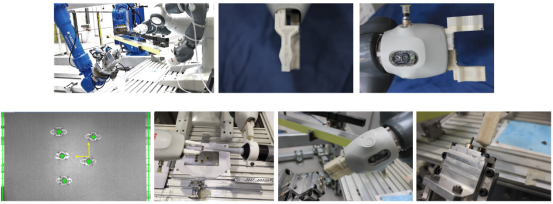
小部件装配(插钉)

XX战斗机机舱装配
数字孪生:





双向数字孪生系统(机翼测量和小翼装配)
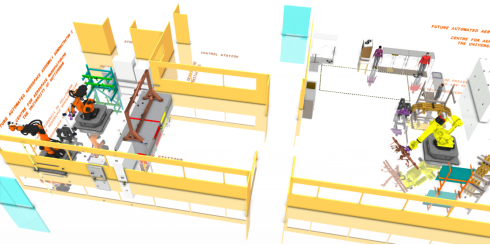
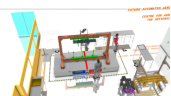
大飞机集群制造:
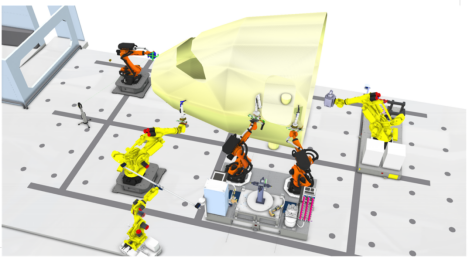
大飞机机器人孪生集群制造(研发中)
六、科研项目
七、代表论文
1. Wang, Likun, et al. "Uncertainty-propagated Cartesian coordinated human–robot collaboration on Riemannian manifold with hidden state-space model." Engineering Applications of Artificial Intelligence 117 (2023): 105491.(IF = 8.0, Top)
2. Wang, Likun, et al. "Imitation learning for coordinated human–robot collaboration based on hidden state-space models." Robotics and computer-integrated manufacturing 76 (2022): 102310. (IF = 10.4, Top)
3. Wang, Likun, et al. "Deep Dynamic Layout Optimization of Photogrammetry Camera Position Based on Digital Twin." IEEE Transactions on Automation Science and Engineering (2023). (IF= 5.6, Top)
4. Wang, Likun, et al. "Digital-twin deep dynamic camera position optimisation for the V-STARS photogrammetry system based on 3D reconstruction." International Journal of Production Research (2023): 1-20.(IF = 9.2, Top)
5. Wang, Likun, et al. "Multi-agent Cooperative Swarm Learning for Dynamic Layout Optimisation of Reconfigurable Robotic Assembly Cells based on Digital Twin," Journal of Intelligent Manufacturing. Accepted, (IF=8.3, Top)
八、荣誉与奖励
2022年7月,研究成果受邀参加全世界顶级范堡罗国际航空展(全世界顶级的航空航天盛会)。参展中,现任英国国防大臣本·华莱士和国防影子大臣影子内阁国防大臣约翰·希利对本人的成果作出了积极肯定的评价。


虚拟现实

