基于拟神经形态事件的视觉里程计是视觉同步定位与建图(SLAM)领域的一个新兴技术分支。其研究目标是将仿生的拟神经形态视觉技术应用于移动机器人的状态估计任务,以解决传统方法在高速运动、非理想光照等极端工况下性能退化或失效的问题。作为新一代视觉传感器,事件相机相比于传统相机具有更高的时间分辨率和动态范围,能够为移动机器人在高速运动或高动态范围光照场景下的位姿估计提供强有力的支持。然而,如何设计兼容此类传感器特殊数据结构的高效算法,仍然是一个极具挑战性的研究问题。
针对上述问题,湖南大学周易教授团队(NAIL实验室)在先前的研究基础之上进行了创新性改进,提出了基于事件相机的双目视觉与惯性里程计系统,着重优化了3D建图效率与位姿估计精度。通过设计新型边缘点的采样策略并融合前后帧与左右目的深度信息,有效提升了建图模块的完整性与计算效率;针对相机位姿估计中俯仰与偏航分量的退化问题,该研究通过引入IMU测量数据作为运动先验,构建紧凑且稳健的后端优化框架,实现IMU偏置与线速度的实时估计。实验表明,相较于现有主流算法,研究所提出的系统在大尺度室外场景下展现出更高的定位精度(图1)和更为优秀的实时性能。
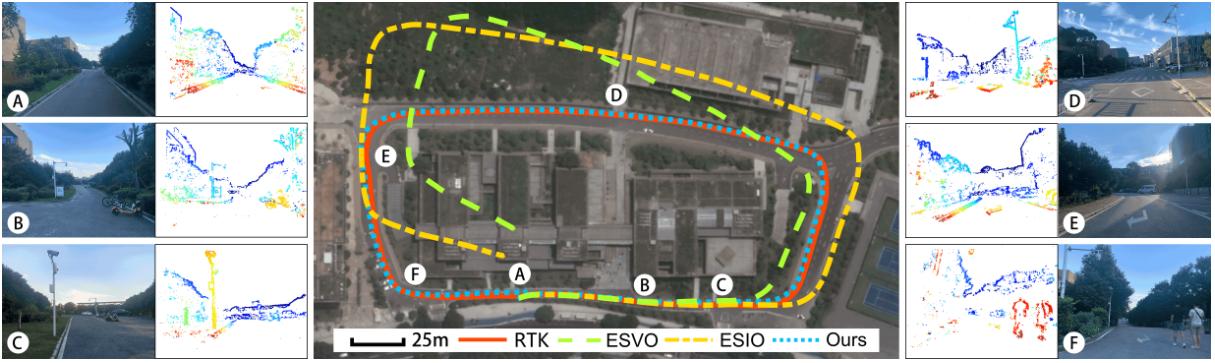
图1湖南大学校园内的定位实验结果展示。
研究成果以“ESVO2: Direct Visual-Inertial Odometry with Stereo Event Cameras”为题发表在机器人领域顶级期刊IEEE Transactions on Robotics(T-RO)上。同时,该论文系机器人学院首次以学生作为第一作者发表在T-RO期刊的科研成果。湖南大学机器人学院为该工作第一完成单位,2023级博士生牛军凯与钟声为共同第一作者,周易教授为通讯作者。此外,香港科技大学郑家纯机器人研究所的路修远博士、沈劭劼教授,以及柏林工业大学的Guillermo Gallego教授也参与了该项工作。该项研究得到了国家自然科学基金等项目资助。

来源:机器人学院
通讯员:江颖
编辑:罗立丹
责任编辑:周丹

