姓名:钟杭
职称:副教授,岳麓学者
邮箱:zhonghang@hnu.edu.cn
通信地址:湖南大学桃子湖机器人学院C2栋101室
谷歌学术:
https://scholar.google.com.hk/citations?user=nogviLMAAAAJ&hl=zh-CN
一、基本情况
钟杭,1990年11月生,湖南大学机器人学院副教授,岳麓学者,博士生导师,国家自然科学基金青年B类项目(原国家优秀青年科学基金)获得者,机器人视觉感知与控制技术国家工程研究中心研究员,国家重点研发计划青年项目首席,湖南省科技创新领军人才,入选博士后创新人才支持计划、湖南大学杰出博士后,担任中国自动化学会机器人智能专委会委员、青年工作委员会副秘书长,中国指挥与控制学会青年工作委员会委员,中国计算机学会智能机器人专委会委员等,获湖南省青年科技奖、吴文俊人工智能青年科技奖、湖南省优秀博士学位论文、湖南大学优秀教师新人奖等。
近年来,主持国家重点研发计划青年科学家项目、国家自然科学基金青年科学基金项目(B类)[原优秀青年科学基金项目]、军科委技术领域基金项目等,参与基金委重大、基金委仪器、科技创新2030-“新一代人工智能”重大、军科委基础加强重点等项目。近5年来,在Engineering等高水平期刊发表论文50余篇,在Springer上出版《Electric Power Robots》专著1部。技术成果获2025年教育部科学研究优秀成果奖(自然科学和工程技术)特等奖、2023年湖南省科技进步一等奖、2020年湖南省科学技术创新团队奖、2019年中国商业联合会科技进步一等奖等,指导学生获中国国际“互联网+”大学生创新创业大赛银奖、中国研究生机器人创新设计大赛一等奖、全国人工智能应用场景创新挑战赛全国一等奖等。
二、教育与工作经历
2022.12-至今湖南大学,机器人学院副教授,王耀南院士团队
2020.5-2022.11湖南大学,控制科学与工程,博士后,导师:王耀南院士
2013.9-2020.4湖南大学,控制科学与工程,博士(硕博),导师:王耀南院士
2009.9-2013.6湖南大学,电气工程及其自动化,学士
三、科研项目
[1].国家自然科学基金青年科学基金项目(B类)[原优秀青年科学基金项目],空中复杂环境作业机器人(62522312),2026.1-2028.12,主持
[2].国家重点研发计划青年科学家项目,刚柔软一体化空中接触式作业机器人系统及应用(2022YFB4701800),2023.1-2025.12,主持
[3].军科委173技术领域基金,XXX环境感知模组,2023.11-2025.11,主持
[4].国家自然科学基金联合基金重点项目课题,面向跨场景自主作业的机器人应用验证及性能评估(U22A2057),2023.1-2026.12,主持
[5].国家自然科学基金青年项目,空中作业机器人接触模态动力学耦合建模与自主控制方法研究(62103140),2021.10-2024.10,主持
[6].湖南省科技创新领军人才(2023RC1049),2023.9-2025.9,主持
[7].博士后创新人才支持计划(BX20200122),2020.07-2022.07,主持
[8].湖南省自然科学基金青年项目,面向探测与维护任务的空中作业机器人自主控制方法研究(2021JJ40124),2021.1-2023.12,主持
[9].国家自然科学基金重大科研仪器研制项目,面向扑翼飞行机器人的感控一体化测试分析仪(62427813),2025.01-2029.12,参与
[10].军委科技委重点项目,无人集群XXXXX,2021.11-2025.11,参与
[11].科技创新2030—“新一代人工智能”重大项目课题,自主无人系统的开放通用高端智能控制器(2021ZD0114503),2022.6-2025.5,参与
[12].国家自然科学基金重点项目,复杂受限环境下机器人多模态三维感知与自主灵巧作业研究(62133005),2021.10-2026.10,参与
[13].国家自然科学基金共融机器人重大研究计划,面向生物疫苗制造的配药制药共融机器人关键技术研究(92148204),2022.01-2025.12,参与
[14].长沙市科技重大专项,面向重大疫情的应急防控救护智能机器人(kh2102023),2020.7-2024.6,参与
四、代表性论文、著作
[1].Electric Power Robots: Modeling, Control, and Applications[M]. Springer Nature, 2025.
[2].Parameterized Motion Planning for Aerial Manipulators in Contact with Unstructured Surfaces[C]//2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025: 5401-5406.
[3].A Method for Constructing Building Structure Grid Map Based on a Climbing Algorithm[C]//2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025: 13753-13758.
[4].Optimization-Based Single Anchor UWB Positioning System for Mobile Robots[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 1-11.
[5].Prototype, modeling, and control of aerial robots with physical interaction: A review[J]. IEEE Transactions on Automation Science and Engineering, 2024, 22: 3528-3542.
[6].Reference optimization-based compliant control for aerial pipeline inspection using a hexacopter with a robotic contact device[J]. IEEE/ASME Transactions on Mechatronics, 2024, 29(6): 4063-4074.
[7].Current status, challenges, and prospects for new types of aerial robots[J]. Engineering, 2024, 41: 19-34.
[8].Adaptive force tracking impedance control for aerial interaction in uncertain contact environment using barrier function[J]. IEEE Transactions on Automation Science and Engineering, 2023, 21(3): 4720-4731.
[9].Robust variable impedance control for aerial compliant interaction with stability guarantee[J]. IEEE Transactions on Industrial Informatics, 2023, 20(3): 3351-3360.
[10].A homography-based visual servo control approach for an underactuated unmanned aerial vehicle in GPS-denied environments[J]. IEEE Transactions on Intelligent Vehicles, 2022, 8(2): 1119-1129.
五、部分授权专利
[1].空中飞行滑动接触式检测作业机器人, ZL202511269960.2, 2025-09-08
[2].一种机器人曲面垂直接触检测的运动规划方法及系统, ZL202511174836.8, 2025-08-21
[3].一种刚柔软一体化的空中接触式作业机器人及控制方法, ZL 202510251944.4, 2025-05-06
[4].一种用于空中机器人自主作业的视觉阻抗控制方法及系统, ZL202411008641.1, 2024-07-26
[5].风力发电机叶片检测攀爬机器人及其运动控制方法, ZL202411008813.5, 2024-07-26
[6].一种基于视觉的旋翼无人机抗扰动控制方法及系统,ZL202310443703.0, 2023-06-23.
[7].一种用于空中接触式无损检测作业的机器人及控制方法,ZL202111594747.0, 2021-12-24.
[8].稳定性约束下的空中作业机器人可变阻抗控制方法及系统, ZL202310878118.3, 2023-08-25.
[9].GPS拒止环境下空中机器人视觉自主控制方法及系统, ZL202111407640.0, 2021-11-24.
[10].一种用于输电线路维护的空中作业机器人,ZL202010916309.0, 2020-09-03.
六、学术人才荣誉
[1].2025年湖南省人民政府,第十三届湖南省青年科技奖
[2].2024年中国人工智能学会,吴文俊人工智能青年科技奖
[3].2024年湖南大学年度教学优秀奖
[4].2023年湖南省科技创新领军人才
[5].2023年湖南大学优秀教师新人奖
[6].2022年湖南省优秀博士学位论文
[7].2022年湖南大学第三届杰出博士后
[8].2020年人力资源与社会保障部,博士后创新人才支持计划
七、科研教学奖励
[1].2025年教育部科学研究优秀成果奖(自然科学和工程技术)特等奖,高危复杂环境特种作业机器人关键技术及工程应用,排名3/6
[2].2025年湖南省高等教育教学成果奖特等奖,科教融汇、产教融合、赛创融通:机器人工程本科创新人才培养体系构建与实践,排名4/9
[3].2023年湖南省科技进步一等奖,工业制造机器人高精准视觉感知与控制关键技术及应用,排名5/12
[4].2020年湖南省科技进步创新团队奖,湖南大学机器人感知与智能控制创新团队,排名14/15
[5].2019年湖南省科技进步二等奖,高端智能铸造机器人柔性生产线关键技术及成套装备,排名5/8
[6].2017年湖南省科技进步一等奖,电力极端环境特种作业机器人关键技术及应用,排名11/12
七、主要科研方向
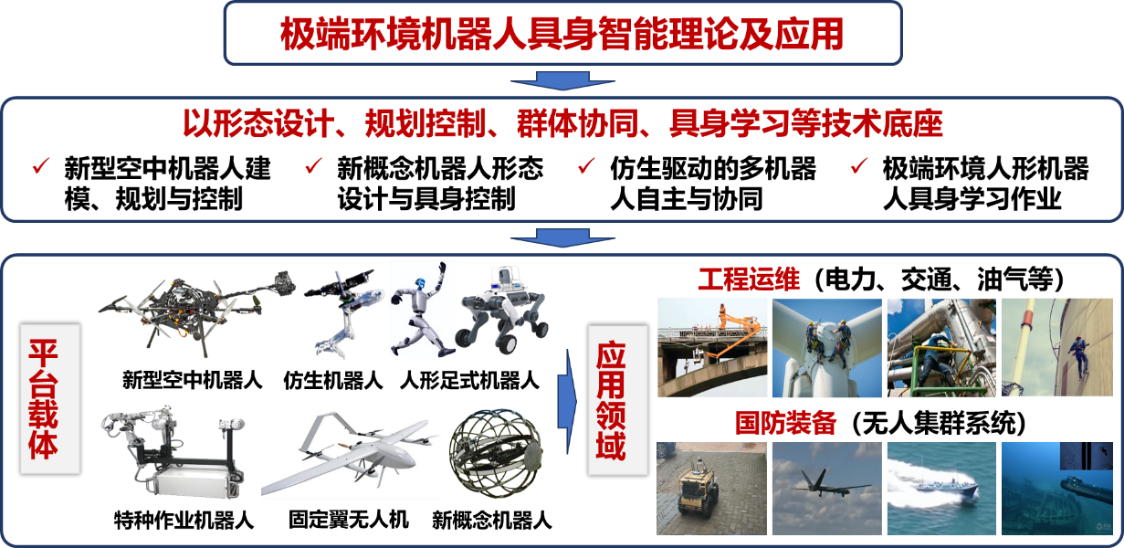
课题组聚焦极端环境下机器人具身智能领域,以机器人形态设计、规划控制、群体协同、具身学习为技术底座,重点开展新型空中机器人、新概念机器人、人形机器人关键技术与系统设计研究,应用于电力、交通、油气等工程运维以及国防无人系统装备等。具体科研方向如下:
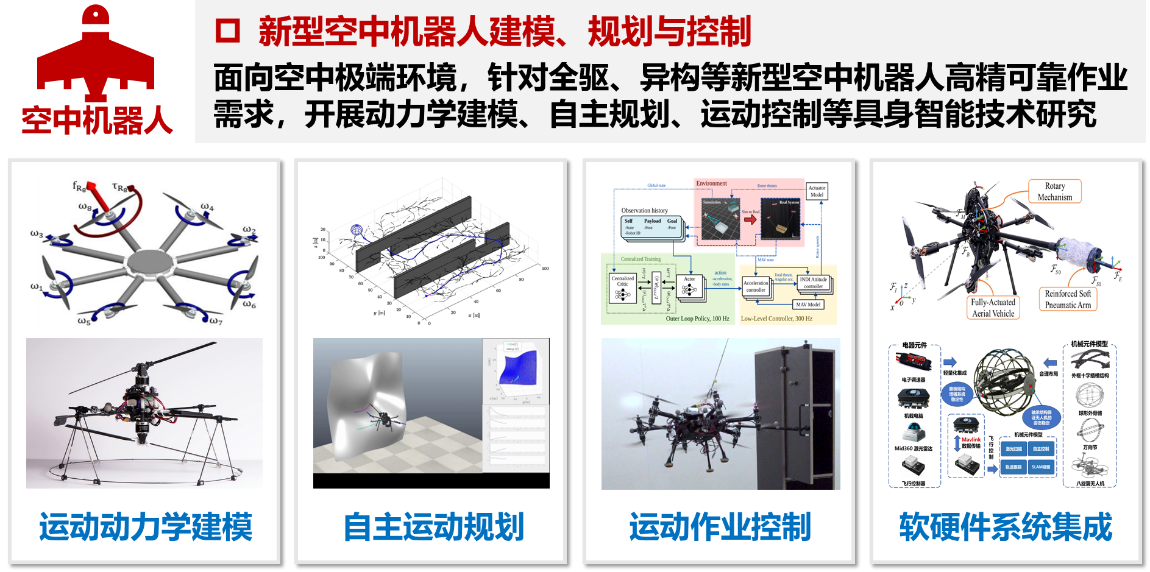
(1)新型空中机器人建模、规划与控制:面向空中极端环境,针对全驱、异构等新型空中机器人高精可靠作业需求,开展动力学建模、自主规划、运动控制等具身智能技术研究。
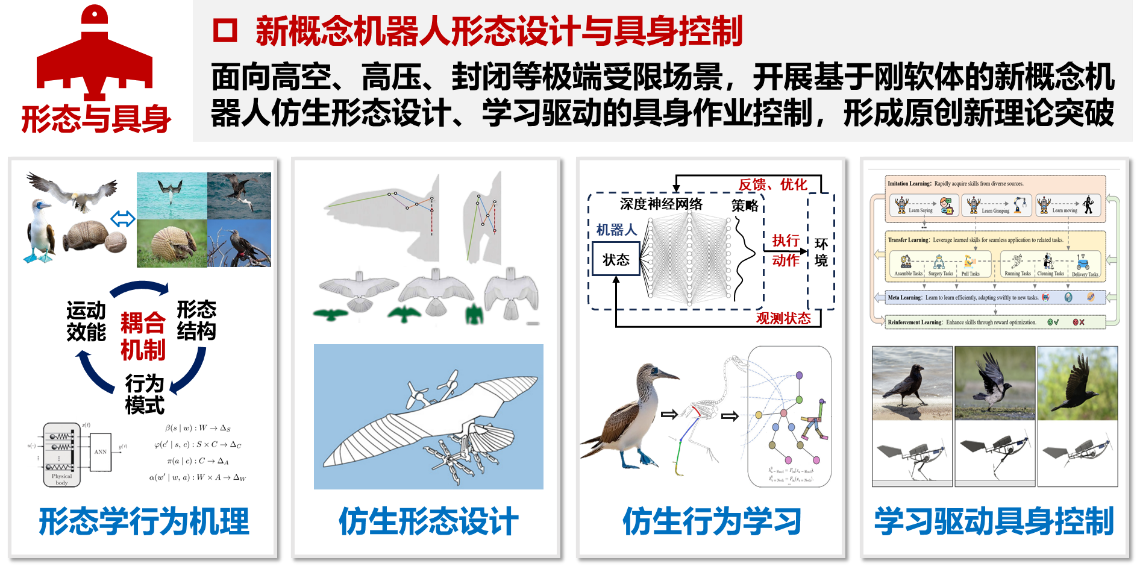
(2)新概念机器人形态设计与具身控制:面向高空、高压、封闭等极端受限场景,开展基于刚软体的新概念机器人仿生形态设计、学习驱动的具身作业控制,形成原创新理论突破。
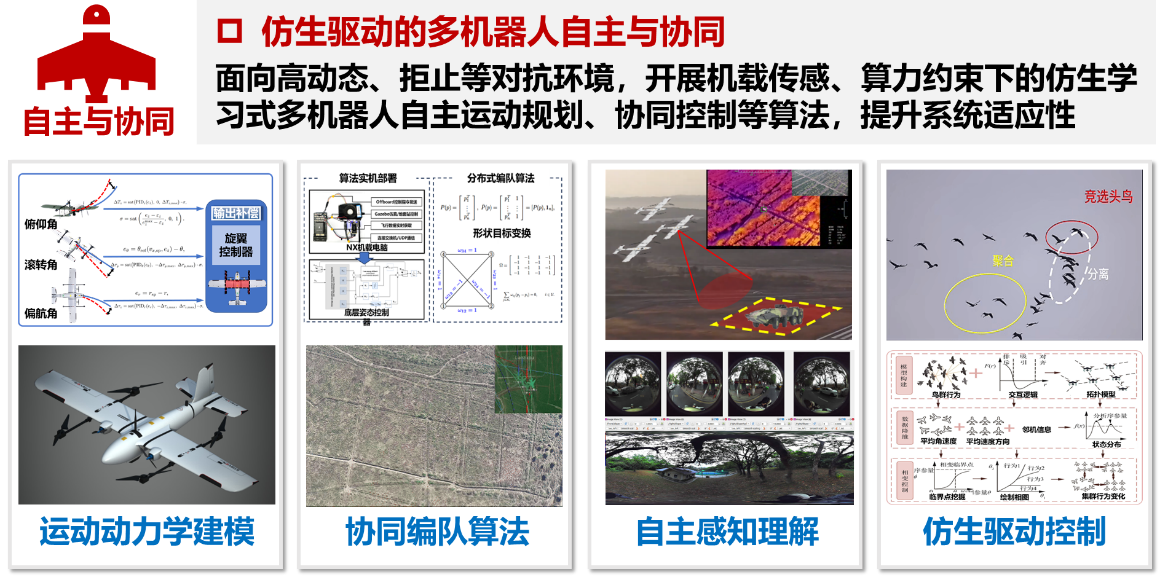
(3)仿生驱动的多机器人自主与协同:面向高动态、拒止等对抗环境,开展机载传感、算力约束下的仿生学习式多机器人自主运动规划、协同控制等算法,提升系统适应性。
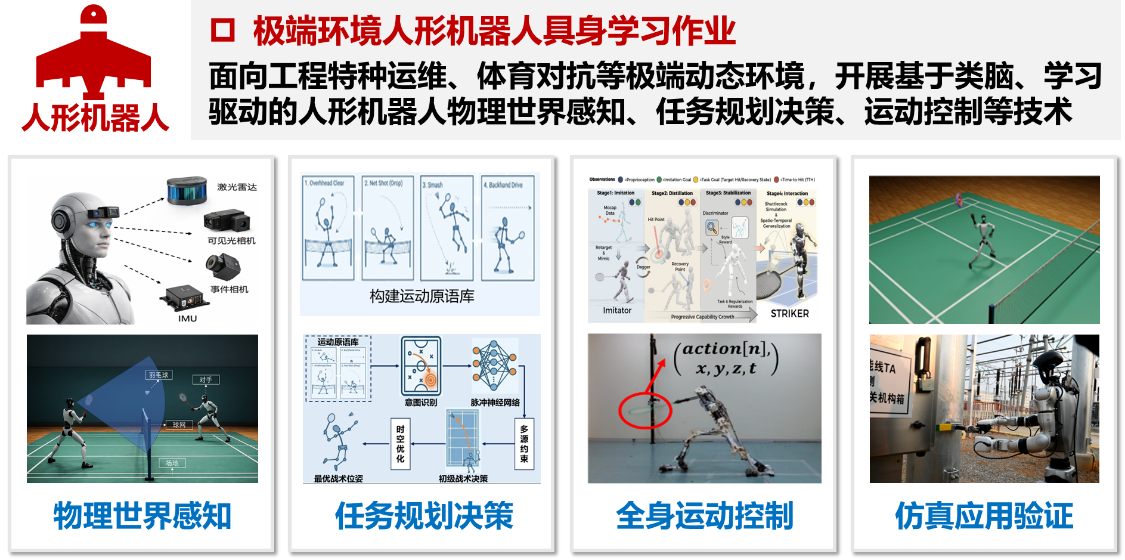
(4)极端环境人形机器人具身学习作业:面向工程特种运维、体育对抗等极端动态环境,开展基于类脑、学习驱动的人形机器人物理世界感知、任务规划决策、运动控制等技术。